I nostri robot industriali ad alta velocità includono robot a sette assi ad alto carico utile, a raggio esteso e ultra manovrabili e esclusivi robot a doppio braccio a 15 assi.
Pallettizzazione
Panoramica
Pallettizzazione e depallettizzazione con robot Motoman
La pallettizzazione è l'operazione di impilamento dei prodotti su un pallet di spedizione in legno (o plastica) per il trasporto. La depallettizzazione è lo scarico di questi prodotti a destinazione. La pallettizzazione è un'operazione relativamente semplice da eseguire per un robot, in quanto richiede una variabilità minima. La depallettizzazione è più complessa e in genere richiede l'utilizzo di sistemi di visione artificiale e sofisticati effettori terminali.
Yaskawa Motoman offre ai produttori un'ampia gamma di soluzioni robotiche per la pallettizzazione e la depallettizzazione. Grazie alla robotica flessibile con sistemi di visione 2D e 3D, software e utensili specializzati consentono di personalizzare le operazioni di spedizione e ricezione senza compromettere velocità e precisione.
Celle di lavoro e imballaggi standard per la pallettizzazione
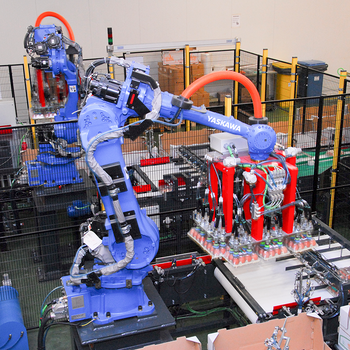
La nostra rete di integratori di sistemi, Motoman Strategic Partners, offre un'ampia varietà di celle di pallettizzazione standard, progettate tenendo conto delle esigenze tipiche dei clienti e dell'esperienza degli integratori di sistemi.
Turnkey Palletizing Workcells
Our network of system integrators, Motoman Strategic Partners, offers application expertise to deliver turn-key robotic solutions for palletizing cartons, trays, bags and other product types. Capabilities also extend to case packing, order picking and warehouse distribution systems to meet your market demands.
Soluzioni di pallettizzazione chiavi in mano
In un sistema di pallettizzazione robotizzato, i prodotti entrano spesso nella stazione di pallettizzazione da un nastro trasportatore di alimentazione. Il robot è programmato per impilare i prodotti sul pallet secondo uno schema predefinito. Le celle di pallettizzazione sono talvolta configurate con distributori di pallet, strumenti per l'inserimento di fogli intercalari e stazioni di termoretrazione per automatizzare completamente il processo di pallettizzazione. I robot sono in grado di prelevare il pallet da una postazione, impilare le scatole e aggiungere cartoni di separazione tra gli strati, se necessario.
Robot e prodotti per pallettizzazione Motoman
La gamma di prodotti per pallettizzazione Motoman comprende:
- Robot pallettizzatori a 4 e 5 assi (serie MPL e PL) con capacità di carico da 50 kg a 800 kg.
-
Robot di movimentazione a 6 assi (serie GP)
-
Robot pallettizzatori collaborativi HC10, HC10DT, HC10DT-IP67 and HC20DT
-
Software di pallettizzazione Pallet Solver per la generazione di modelli e la programmazione offline dei robot.
-
Sistemi di visione robotica 2D MotoSight per consentire la pallettizzazione e la depallettizzazione in ambienti strutturati o non strutturati.
-
MotoSim, un pacchetto software completo che fornisce una simulazione 3D accurata delle celle robotizzate, la modellazione della portata, il calcolo dei cicli e la programmazione offline di sistemi complessi.
Applicazioni di pallettizzazione con cobot Motoman
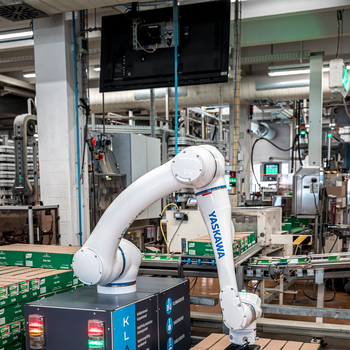
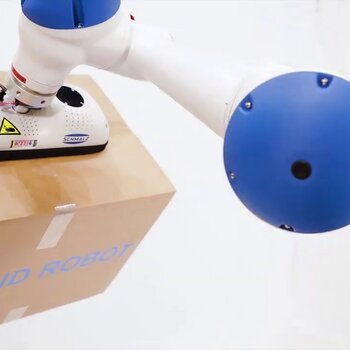
La pallettizzazione di scatole di cartone o casse in magazzini logistici, depositi, centri di distribuzione, intralogistica, aziende vinicole e molti altri contesti è un lavoro di routine faticoso e insalubre per gli operatori manuali, soprattutto quando si tratta di scatole di grandi dimensioni e/o con pesi superiori a 8 kg. Con la pallettizzazione manuale, la velocità del ciclo, il metodo, l'allineamento e la stabilità della pila possono risultare instabili. A causa delle normative sanitarie, molti potenziali clienti con questo tipo di mansioni hanno valutato l'automazione robotica; tuttavia, un'installazione di pallettizzazione tradizionale richiederebbe recinzioni o modifiche al flusso di lavoro e al layout, con conseguente ROI irragionevole per tali progetti di automazione.
La collaborazione uomo-robot ha risolto questo dilemma, combinando la precisione di una soluzione robotica con un'installazione senza recinzioni e una programmazione semplice.
Costruire semplici stazioni di pallettizzazione collaborativa senza recinzioni è un'operazione facile, perché la tecnologia robotica e delle pinze è già disponibile, la valutazione dei rischi non è particolarmente complessa e l'installazione e la programmazione richiedono sforzi minimi.

Software Motoman PalletSolver
PalletSolver èun'applicazione software che genera automaticamente schemi di pallettizzazione (impilamento 2D/3D) e il corrispondente movimento del robot, inclusa la pianificazione del percorso e la mappatura I/O (controllo della pinza). Supporta diversi tipi di pinze e pallet multipli.
MotoSim Offline Simulation Engineering Tool
Per la progettazione delle stazioni di pallettizzazione, consigliamo di utilizzare il software MotoSim per creare un gemello virtuale della cella di lavoro. In questo modo è possibile disporre i componenti nella posizione ottimale, individuare la posizione ideale del robot al centro del nastro trasportatore, determinare l'altezza corretta del supporto del robot, eseguire test di portata e accessibilità, verificare gli schemi e le altezze di impilamento e ottimizzare l'intera cella di lavoro in termini di velocità di ciclo e ingombro prima di procedere alla realizzazione dell'hardware.
Per installazioni collaborative (senza barriere), il layout e la sequenza video risultanti sono perfetti per discussioni preliminari sulla sicurezza e sui rischi. È possibile sperimentare il rapporto tra interazione umana sicura e funzionamento ad alta velocità senza intervento umano, ottenendo preziose informazioni sui tempi di ciclo e sul ritorno sull'investimento (ROI).
Motologix - Programmazione Robot IEC 61131 tramite PLC
Motologix è un'interfaccia software per la programmazione diretta di robot tramite blocchi funzione PLC, disponibile per tutte le principali marche di PLC e fieldbus. Funziona con tutti i robot Motoman (inclusi i cobot!) con controllori YRC1000, YRC1000micro e DX200 e supporta il controllo master/slave su un massimo di 4 robot, assi esterni e nastri trasportatori. Non è richiesta alcuna conoscenza di teach pendant o di robotica Yaskawa per la programmazione, il collaudo o il funzionamento del robot. I dati vengono memorizzati nel PLC. Le prestazioni di percorso e velocità sono equivalenti ai metodi di programmazione robotica convenzionali.
Questa tecnologia è perfetta per i clienti OEM
- che desiderano integrare robot di pallettizzazione di fine linea nella propria linea di confezionamento, controllando tutti i movimenti esclusivamente tramite PLC
- che hanno una solida esperienza nella programmazione PLC e non vogliono addentrarsi nella programmazione robotica
Pinze per pallettizzazione di pallet, scatole, sacchi e altri pezzi
Un elemento fondamentale per il successo di un'applicazione di pallettizzazione è la progettazione e l'affidabilità delle pinze. I nostri partner integratori di sistemi di pallettizzazione possiedono competenze specifiche nei rispettivi mercati e applicazioni.
Pallettizzazione di scatole e blister con robot Motoman
Le scatole sono stabili e presentano una comoda geometria cubica con superfici piane. La loro presa è agevole per i robot che utilizzano pinze pneumatiche o semplici pinze meccaniche.
Palletatura di scatole singole
Pallettizzazione di più scatole - Parti e strati multipli
La gestione di più scatole per prelievo aumenta la produttività della stazione robotizzata. Tuttavia, richiede maggiori sforzi sul lato del nastro trasportatore per smistare e posizionare le scatole in una griglia o uno schema ben organizzato per il prelievo da parte del robot di pallettizzazione. La cinematica della pinza potrebbe essere più avanzata e il software di generazione dello schema di impilamento richiede maggiore attenzione. Una buona progettazione della pinza per alta velocità e produttività è il know-how fondamentale dell'integratore di sistemi. I robot Motoman offrono eccellenti velocità degli assi per supportare schemi di movimento rapidi.
Pallettizzazione di scatole - Più strati
La gestione di più scatole in sequenza è utile per ottenere una maggiore produttività nella stazione robotizzata. Tuttavia, richiede maggiori sforzi sul lato del nastro trasportatore per smistare e posizionare le scatole secondo una griglia o uno schema. La cinematica della pinza può essere più avanzata rispetto a una semplice pinza pneumatica, o quantomeno il software di impilamento che crea le posizioni di posizionamento è più sofisticato. La progettazione di pinze per alta velocità e produttività è il know-how principale dell'integratore di sistemi. I robot Motoman offrono eccellenti velocità degli assi per supportare schemi di movimento rapidi.
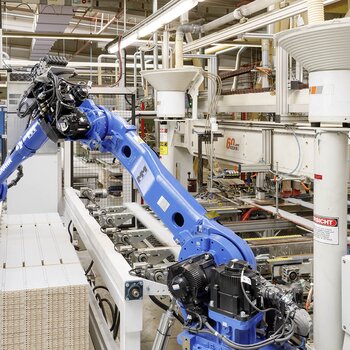
Pallettizzazione di sacchi con robot Motoman
Le pinze robotizzate per sacchi (pneumatiche e meccaniche) sono più complesse delle pinze per scatole. Le pile di sacchi sui pallet sono meno stabili e richiedono una maggiore intelligenza nella valutazione del modello di impilamento.
I prodotti tipicamente pallettizzati con robot sono granulati e polveri, come sale, prodotti chimici, fertilizzanti, mangimi per animali, sabbia, semi, pacciame di corteccia e pellet o pietre lavate.
Palletizzazione di sacchi - Pezzi singoli
Pallettizzazione di merci confezionate in fogli di plastica con robot Motoman (fazzoletti di carta)
Pallettizzazione di bevande con robot Motoman (bottiglie e casse)
Molti dei nostri robot di pallettizzazione Motoman sono installati nell'industria delle bevande. Come accessorio, YASKAWA offre il sistema di presa bottiglie "Airgrip", estremamente affidabile, flessibile e sicuro.
Pallettizzazione di lattine e contenitori in plastica stampati a soffiaggio con robot Motoman (acqua, prodotti chimici, olio)
Pallettizzazione di libri con Motoman Robots
Pallettizzazione di casseforme per fusione in sabbia con robot Motoman
Depallettizzazione con robot Motoman
La depallettizzazione di prodotti disposti in posizioni predefinite su strati 2D è un'operazione di automazione semplice, che si riduce essenzialmente a una semplice operazione di prelievo e posizionamento.
Depallettizzazione casuale di scatole con sistemi di visione artificiale intelligenti
Nelle applicazioni più complesse di robot per la depallettizzazione casuale, i pezzi possono variare in posizione o geometria. In questi casi, è coinvolta la visione artificiale 2D/3D, che calcola il punto di prelievo, la posizione di prelievo e la traiettoria di avvicinamento per il robot. Grazie alla potenza del software di visione odierno, basato sul riconoscimento delle caratteristiche o sull'intelligenza artificiale (reti neurali), i robot possono raggiungere tassi di prelievo incredibilmente elevati.