


















I nostri robot industriali ad alta velocità includono robot a sette assi ad alto carico utile, a raggio esteso e ultra manovrabili e esclusivi robot a doppio braccio a 15 assi.
Robotics Software
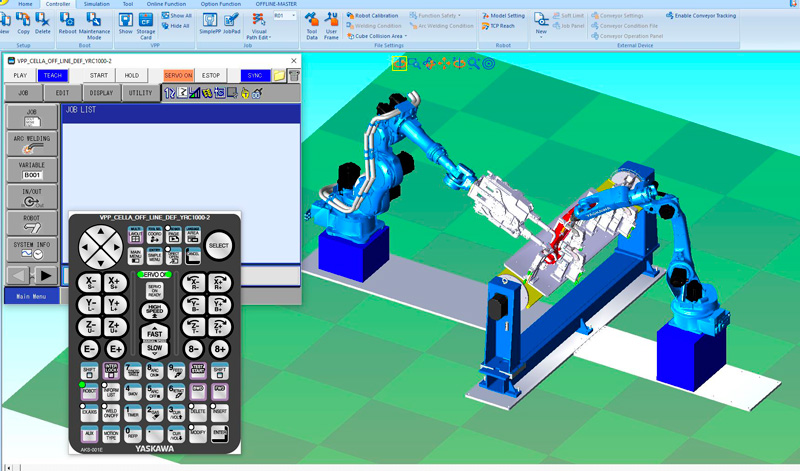
MotoSim EG-VRC
MotoSim è un sistema di programmazione offline con simulazione 3D.

Panoramica
Il potente software di simulazione MotoSim EG-VRC permette la programmazione offline di sistemi complessi, riduce al minimo i tempi di configurazione e offre funzioni di controllo avanzate e la simulazione della famiglia di prodotti Yaskawa tra cui robot, gantry, binari e posizionatori.
MotoSim EG-VRC supporta numerose applicazioni di processo, come saldatura ad arco, saldaura a punti, taglio, handling e verniciatura.
Caratteristiche principali:
- Rilevamento, analisi del raggio d'azione e calcolo del tempo di ciclo
- Visualizzazione del teach pendant reale dalla generazione NX100 in poi
- Supporta il linguaggio di programmazione INFORM
- Simulazione completa del software del robot in ambiente PC
- Creazione di configurazioni di sistema equivalenti al controllore reale
- Trasferimento di programmi offline al controllore reale senza necessità di compilazione
- Ottimizzazione dei programmi robot esistenti senza interrompere la produzione
- Visualizzazione e calcolo dei percorsi reali del robot
- Vari strumenti di misurazione e analisi
- Semplice integrazione dei modelli utente nella libreria di modelli Yaskawa disponibile
- Supporta simulazioni multi-robot e multi-controllore
- Controllo di robot e assi esterni, compreso il movimento sincrono del robot
Sei interessato a provarlo? Registrati qui: Robotics Software Download Portal!
MotoSim Plug-in WinMOD MS200
Il plugin WinMOD MS200 consente di integrare robot virtuali programmati con MotoSim EG-VRC nel sistema WinMOD esistente. Ciò consente di collegare i robot a vari sistemi di automazione e di testarli in combinazione con controller reali o virtuali. A seconda dell'applicazione, è possibile simulare e visualizzare come modello 3D anche le periferiche del robot (ad esempio pinze o slitte), il flusso dei materiali e i messaggi dei componenti dell'intero sistema. Il comportamento funzionale dei componenti e dei processi viene realizzato tramite simulazioni in tempo reale all'interno dell'ambiente WinMOD o collegando sottosistemi selezionati con simulazioni esterne (ad esempio con Process Simulate).

Guarda il video in cui un tecnico Yaskawa mostra tutti i vantaggi di MotoSim EG-VRC, spiegando come supporti progettazione, aggiornamento di sistemi e formazione.
Dettagli tecnici
- Tipo di prodotto
- Offline Tools
- Mobile App
- x No
- Sistema operativo
- MS Windows
- CPU Min. richiesta
- x No
- RAM Min. richiesta
- x No
- Capacità HDD Min. Richiesta
- x No
Download
| Nome | |||
| Flyer Software MotoSimEG-VRC Brochure & Cataloghi | inglese | Brochure & Cataloghi | inglese | |
| Flyer Software MotoSimEG-VRC Brochure & Cataloghi | tedesco | Brochure & Cataloghi | tedesco | |
| Flyer Software MotoSimEG-VRC Brochure & Cataloghi | spagnolo | Brochure & Cataloghi | spagnolo | |
| Flyer Plugin WinMOD DS200 Brochure & Cataloghi | tedesco | Brochure & Cataloghi | tedesco | |
| Flyer Plugin WinMOD DS200 Brochure & Cataloghi | inglese | Brochure & Cataloghi | inglese |

